Client
Les concepteur et les utilisateur de robots industriels
Problématique
Améliorer la précision de la préhension en effort et en position.
Solution
L'utilisation de capteurs de force 6 axes comme le K6D80 permet d'améliorer la performance, la fiabilité et la flexibilité des robots industriels grâce à une double boucle d'asservissement position et effort.
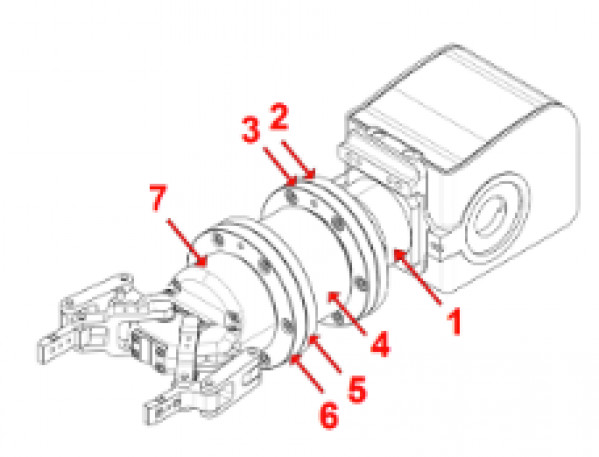 |
Le capteur de force/couple (4) est monté entre le robot (1) via la bride (2) et plaque de montage (3), et à la pince articulée (7) via la plaque de mesure (5) et la bride (6). |
|---|
La précision élevée du capteur K6D80 est obtenue par la conception très rigide, et un process de calibration optimisé.
Résultats et avantages client
- Amélioration nette de la sensibilité et de la précision de la préhension
- Réduction des non-conformités et des temps de cycles
- Détection anticipée de défauts par retour d'effort
- Mesure de dérive