
Client
Fabricant concepteur de robots collaboratifs (cobots)
Contexte
Les robots collaboratifs, ou cobots, permettent une intéraction réelle avec les opérateurs, en les soulageant dans les opérations les plus pénibles. Toutefois, avec ce type de robot, les barrières de protection ne peuvent plus être utilisées, et des stratégies fiables et performantes deviennent nécessaires pour garantir la protection des opérateurs en cas de collision.
Problématique
Donner au robot la capacité de détecter une intéraction avec un obstacle (opérateur ou objet). La détection doit se faire en un temps très court pour immédiatement stopper l'opération et éviter tout dommage corporel ou matériel.
Solution PM Instrumentation
Pour détecter une collision du robot avec un opérateur ou matérielle, le cobot est placé sur une balance 6 composantes, capables de détecter tous les efforts et moments exercés sur le robot. Dans le même temps, le cobot est équipé de capteurs de préhension (boutons de charge ou capteurs 6 composantes).
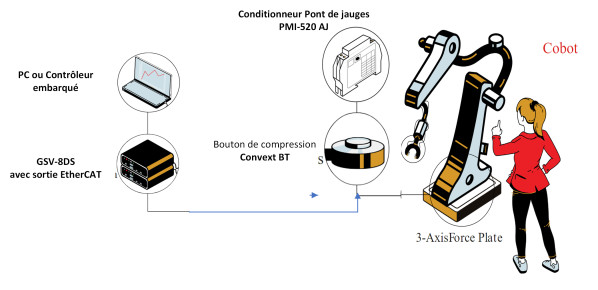
Les mesures de la plateforme et du préhenseur sont remontées via EtherCAT vers le contrôleur. L'analyse temps réel des deux flux de données se fait de manière simultanée, et permet de faire la distinction entre une intéraction intentionnelle ou accidentelle. Dans le cas d'une intéraction accidentelle, le mode protection de l'opérateur est aussitôt activé.
Avantages client
- Une solution spécifique, très performante
- un temps de détection de l'ordre de 100µs
- Simplicité d'intégration
- différents protocoles supportés pour faciliter l'intégration logicielle
- la solution peut être intégrée en 1ère monte ou a posteriori.






