Capteur de force 6 axes - robotique - 50N/5Nm à 1kN/25Nm - EtherCAT




- Capteur de force/couple 6 axes
- technologie : 6 ponts complets de jauges de contraintes
- étendues de mesure Fxyz: ±50N, ±100N, ±200N, ±500N, ±1kN
- Capacité Mxyz: ±5Nm, ±10Nm, ±20Nm, ±25Nm, ±25Nm
- Interfaces : ISO 9409-1-31.33-4-M5 (robotique)
- Classe de précision: 0,2%; Crosstalks : < 1%
- Interface : EtherCAT-P
- Echantillonnage : jusqu'à 1 kHz
- Dimensions: Ø55 mm x 50 mm;
- Connectique: câble 5m compatible chaînes porte-câble avec connecteur M8
- Construction IP54 en Aluminium et Acier
- Température de fonctionnement : 0-50°C
- Poids: < 400 g
- Calibration usine incluse (type à confirmer)
Présentation
Le capteur de force 6 axes à jauges de contraintes K6D55i a été spécialement développé pour les applications robotiques. Le K6D55i mesure les 3 efforts et 3 moments appliqués sur le capteur par l'outillage en simultané, avec une précision de l'ordre de 0,2% de la pleine échelle, à laquelle s'ajoutent les incertitudes liées aux effets intervoies dans une amplitude pouvant atteindre 1%.
L'intégration mécanique est fortement simplifiée grâce aux interfaces ISO 9409-1-31.33-4-M5, permettant le montage direct sur le bras d'un robot manipulateur sans autre bride ni adaptateur. L'encombrement est limité, avec un diamètre extérieur de 55mm et une hauteur de 50mm seulement.
Spécifications
| Modèle | K6D55i (50N/5Nm) | K6D55i (100N/10Nm) | K6D55i (200N/20Nm) | K6D55i (500N/25Nm) | K6D55i (1kN/25Nm) |
|---|---|---|---|---|---|
| Fx-Fy-Fz [N] | 50 | 100 | 200 | 500 | 1000 |
| Mx-My-Mz [Nm] | 5 | 10 | 20 | 25 | 25 |
| Interface | EtherCAT-P | EtherCAT-P | EtherCAT-P | EtherCAT-P | EtherCAT-P |
| Echantillonnage | 1Hz à 1kHz | 1Hz à 1kHz | 1Hz à 1kHz | 1Hz à 1kHz | 1Hz à 1kHz |
| Crosstalks | < 1% | < 1% | < 1% | < 1% | < 1% |
| Alimentation | PoE ou 24V | PoE ou 24V | PoE ou 24V | PoE ou 24V | PoE ou 24V |
Calibration
Chaque capteur est livré avec un certificat de calibration usine contenant une matrice 6x6 (mV vers N et Nm) identifiée en calibration pour minimiser les influences intervoies (cross-talks)
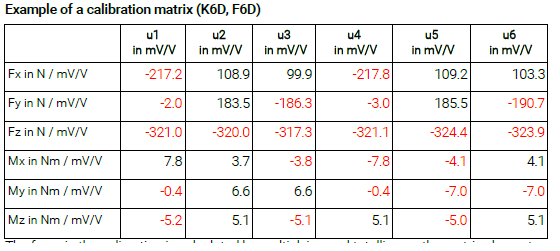
Cette matrice est appliquée en temps réel sur les signaux de mesure par l'électronique embarquée, pour renvoyer sur l'interface EtherCAT les efforts réels et compensés en N et Nm.
Des calibrations spécifiques, incluant plus de points de calibration, ou une plage de travail réduitesont proposées en option.
Installation
Le capteurs de force 6 composantes K6D55i se monte directement sur le bras d'un robot, entre le robot et l'outil, sans bride ou pièce d'adaptation supplémentaire. L'introduction des efforts et la fixation au bras du robot sont réalisées par 4 taraudages M5 + 2 pions de centrage Ø6 mm H7.
Dimensions
Applications
Le capteur de force 6 composantes K6D55i est idéal pour les applications en robotique telles que
- Détection de collision
- Détection de présence ou d'erreur "Teach-In"
- Fonctionnement contrôlé en force ou en couple
- obtenir un retour d'informations d'un outillage
- application de robotique collaborative
Options et accessoires
- Calibration: Standard ou spécifique, ISO-17025
- Compensation en température étendue
- TEDS
- Type de capteur
- Capteur 6 axes, 6 axes robotique
- Nombre de composantes
- 6 Axes
- Précision (erreur totale)
- 0.5 %
- Non linéarité (% PE)
- ± 0.2 %
- Hystérésis
- 0.1 % FS
- Température de fonctionnement
- -10 à 85 °C
- Sortie analogique
- non-amplifié
- Signal de sortie
- 0.4 mV/V
- Tension d'alimentation
- 12-48 VDC
- Direction de mesure
- Traction + Comp.
- Matériau
- Aluminium
- Classe de Protection
- IP64
- Poids
- 0.200
- Plage d'effort à mesurer
- ⩽ 250 N, 250 N - 5 kN
- Application
- OEM, Robotique
à suivre
- Calibration: Standard ou spécifique, ISO-17025
- Câble et connectique pour GSV
- Compensation en température étendue
- TEDS
- Système d'acquisition
- Afficheur
- Câblage spécifique